Tutorial 3 - Utilizing the CAS and Annotators¶
In this tutorial you will learn how to use the CAS that contains
the annotations created by the various Annotators.
A central annotation type for RoboKudo is the ObjectHypothesis.
It marks an object in the scene and many other annotators rely on this
hypothesis to add their own annotations to it.
This basically allows the system to gather more and more information over time
about the detected objects.
In this tutorial, you will work on an Annotator which uses the CAS to
add your own annotation to an ObjectHypothesis.
Specifically, you will create an annotation based on the Region Of Interest (ROI) of an object.
The ROI can be seen as the rectangle around the Objects in the image as seen in the previous tutorial.
Your goal is to calculate its area.
The ROI is available in the roi field of an ObjectHypothesis. Its value is
an ImageROI object with which also has a field roi leading to a Rect object
with four attributes x, y, width and height.
The CAS is accessible in each annotator through its function self.get_cas().
The annotations stored in the CAS are available through its field annotations,
which is a normal python list of all annotations.
Example to access the annotations in the CAS:
cas = self.get_cas()
annotations: List[Annotation] = cas.annotations
The CAS also provides a helper function to retrieve only annotations of a certain
type. This can be used for example to only get ObjectHypothesis annotations:
annotations: List[ObjectHypothesis] = cas.filter_annotations_by_type(
robokudo.types.scene.ObjectHypothesis
)
Each ObjectHypothesis itself also has such a list of annotations.
This was for example used in the ClusterColorAnnotator, where the SemanticColor
annotations were added to the list of annotations on an ObjectHypothesis.
Like Annotators, annotations are also implemented as simple classes.
Task 3-1: Look for the
annotatorsdirectory and implement theupdatefunction inobject_size.pywith the following criteria:For each
ObjectHypothesisin the CAS, calculate the area of the ROI.For each
ObjectHypothesisadd a new annotationSizecontaining the ROI area in its fieldvalue. You can use the already existing annotation classrobokudo.types.annotation.Sizefor that.Depending on the total size, also add one size classification out of
["small", "medium", "large"]to theSizeannotation in theclassfield, by using the following values"small"objects with a size/area of less than35000"medium"objects with a size/area of more than35000and less than50000"large"objects with a size/area of more than50000
At the end of the function return
py_trees.Status.SUCCESSto signal that the execution was successful.
Hint for roi data access
Access to the roi data of an annotation like this:
annotation.roi.roi.width # Check the text above for other possible values.
Task 3-2: Similar to the previous tutorial, add the ObjectSizeAnnotator to the Analysis Engine.
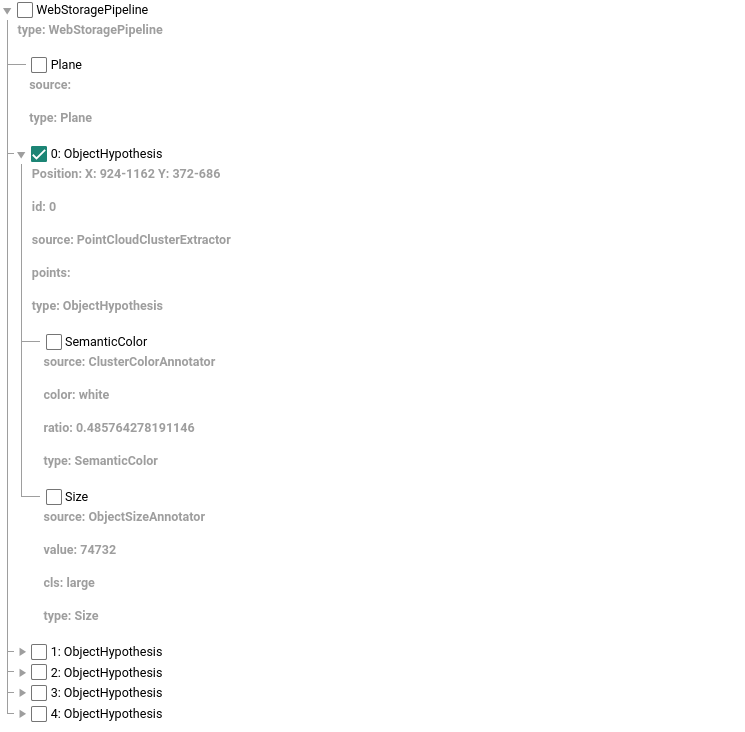
Task 3-3: Restart RoboKudo and send the query of type detect again. Afterwards, scroll down to the details tree next to the output image and check if your annotations show up for each
ObjectHypothesis.
Important
Add the ObjectSizeAnnotator after the ClusterColorAnnotator so that the
ObjectHypothesis annotations are available in the CAS.
object_detection.add_children(
[
# ...
ClusterColorAnnotator(),
ObjectSizeAnnotator(),
# ...
]
)
As an example the output in the details tree could look like this:
The final code of object_size.py could look something like this:
class ObjectSizeAnnotator(robokudo.annotators.core.BaseAnnotator):
def __init__(self, name="ObjectSizeAnnotator") -> None:
super().__init__(name=name)
self.rk_logger.debug("%s.__init__()" % self.__class__.__name__)
def update(self) -> py_trees.common.Status:
# Get all ObjectHypothesis annotations from the CAS
annotations: List[ObjectHypothesis] = self.get_cas().filter_annotations_by_type(
robokudo.types.scene.ObjectHypothesis
)
for annotation in annotations:
# Create a new Size annotation
size = robokudo.types.annotation.Size()
# Set the size value to be the size of the roi
size.value = annotation.roi.roi.width * annotation.roi.roi.height
# Classify the size
if size.value < 35000:
size.cls = "small"
elif 35000 < size.value < 50000:
size.cls = "medium"
else:
size.cls = "large"
# Add the source annotator information to the annotation (optional)
size.source = self.name
# Add the annotation to the list of annotations on the ObjectHypothesis
annotation.annotations.append(size)
return py_trees.Status.SUCCESS